For years I was a die hard user of vi. It was my goto editor of choice. Simple, yet powerful, if you knew some of the commands and understood its basics. Without fail it was available on all the unix and linux servers. In short, it did the job.
Yet as IDEs advanced, it missed some of the features that I really liked when programming, such as code completion and syntax error highlighting.
It was the reason, I started to use Atom and then, after overcoming my anti-Microsoft believes, Visual Studio code.
These features, are now available via LSP (Language Server Protocol) for Vim and NeoVIM. Ironically LSP was developed by Microsoft for Visual Studio Code and is now an open standard.
So the question, was should I try using NeoVIM or just stick with VIM? I’d looked at NeoVIM briefly a while back and didn’t really understand what the difference was. NeoVIM was a rewrite focusing specifically on APIs, extensibility and as being a drop in replacement for vi/VIM. I didn’t understand what the advantage was to me as a general user.
To that end, I thought I’d set both up, via googling and see what the difference were.
Now before you start this yourself. Be aware, that configuring and tweaking everything to your liking, can be time consuming. Then you have to remember what you did and leverage that an on going basis – so every machine will need to be setup the same.
It can make you very productive but just think of that initial learning curve.
What I learnt through the process is, besides the different configuration files, is that there is now feature parity for the most part between the two editors. A few features like neovim telescope are unique to neovim only.
I setup vim and then decided to try NeoVIM. So my setup for NeoVIM is a superset of the VIM configuration. I simply had learnt more and put it to use when I setup NeoVIM.
For now I’ve decided to go with NeoVIM and have Vim available as a fallback. Such that I aliased vim to nvim with alias vim="nvim".
My configuration is still a little fluid. If you’ve got some tips, please leave them in the comments. What have you chosen? What did you like or dislike about a plugin?
You have the most fantastic and revolutionary idea, that is going to change the world. You are stuck! It dawns on you, the data to train your model, simply doesn’t exist.
This paradox, of being without data, would sound familiar to so many. Why is this the case?
You’ve completed the training, done a tonne of experiments with known data. Everything seems fine, the ideas for how to use this newly acquired knowledge, have been brimming away in your subconscious.
Now you are ready to apply your idea to the real world.
Then reality hits! You simply don’t have the data that you need to train a model, that will enable your idea to flourish. To maybe even create your next startup.
This is the biggest challenge many AI startups have, is finding the data they need.
There are basically three ways to get data:
download or acquire it, from an external source,
generate it, from a simulator; or
use sensors in the real world to aggregate a source of your own data.
The last two are very expensive options. Simulators are essential for Deep Reinforcement Learning. Collecting data from sensors, still for the most part, requires augmentation to make it useful, in most Deep Learning scenarios. Not to mention of course, the need for labelling.
So the first is the cheapest, that is to find an existing source of labelled data. There is plenty of known data sets out there.
It all seemed to work so well in the training programs. But why is there not more data? Why is the set of available data sets so limited?
I’ve been asking myself those very questions of late. The best answer I’ve found, is that the Academic researchers are just using the existing sources of labelled data and making incremental improvements on deep learning algorithms. That is, if they invested in creating new sources of data, for new deep learning techniques, they probably wouldn’t get their research done. It is why everything that you’ve learnt just works effortlessly. They’ve been at it for a while now….
So the next question becomes how do I get the data?
You have to create your own data sets! Don’t under estimate the effort needed. Without data you just have an idea!
Homebrew is your best friend to help you setup your new MacBookPro for development. Install homebrew first by following the installation instructions on the homepage.
Its often easier to use brew install <something> then to maintain everything separately.
Yes I still like to use a terminal and the command line at times.
Things I’ve setup are:
iTerm2 – is a replacement for the standard Terminal program
Oh My ZSH – its used to manage zsh configurations and comes with a tonne of helpers
powerlevel10k – is a Zsh theme, that is fast and configurable
neofetch – it displays information about your system
miniforge – is a minimal conda installer specific to condo-forge that works with Apple Silicon
rust-lang – is a programming language with a set of development tools. Toolchain management occurs with rustup. Whilst that can be installed via homebrew, I choose the native install from the installation instructions
Visual Studio Code – is a code editor. There now is a Mac Universal build as well as if you go hunting an Apple Silicon only one under alt-downloads
XQuartz – if you intend to log into linux servers and display X screens this is a must. It has native Apple Silicon support now
Oh My Zsh
OhMyZsh has a lot of plugins. The ones I’ve selected are plugins=(zsh-autosuggestions zsh-syntax-highlighting git extract z rustup cargo rust macos history)
Make sure you select to install the recommended nerd font MesloLGS-NF. Its give you all the icons on the command line. If you install Powerlevel 10K under iTerm2 it’ll update the font settings by default. You may need to manually adjust under Terminal.
Miniforge
I was originally going to just use the default anaconda installer. However that uses Rosetta. Miniforge has native support for Apple Silicon. I installed it using brew install miniforge but there is an Apple Silicon native installer under the download sections.
Still need to determine if the python installation is running under rosetta or is a native Apple Silicon app. However by using homebrew, it its not at some point soon it will be updated.
The main thing I want working is jupyterlab notebooks. This can be done with conda install jupyerlab.
Don’t forget to run conda init zsh for it to automatically update your .zshrc file. Afterwards you’ll also notice that powerlevel10k will display your current conda environment.
ssh
I hate typing in passwords and in general setup ssh and copy ids about.
First you need to generate a ssh key ssh-keygen -t ecdsa -b 521 and then use ssh-copy-id <user>@<hostname>. Afterwards you should be able to log into your linux servers. This worked for me on Ubuntu 20.04.
Other tools
Of course I setup Xcode. Homebrew will automatically install the Xcode command line tools.
Playing around and trying out different things, I managed in an afternoon to set my new MacBookPro up to how I basically like it. Some more tweaking over time and I’ve yet to tweak vim.
Really looking forward to seeing how I can leverage the M1 Max chip in my projects to do with OpenCV and deep learning. That’ll be another post in the future.
It finally arrived this week. I’m the proud new owner of a MacBookPro 16″ with the M1 Max, 32GB of ram, a 24 core GPU and 1 TB hard drive.
It took a month for it to be delivered. It was shipped all the way from Shanghai, to my door. I bought it online via the Apple Store and you get notifications every step of the way.
For a couple of years I’d been reading all the reviews and thinking to myself when is Apple going to get off the Intel bandwagon and fix their keyboards.
My linux servers were all running AMD chips, Intel just didn’t seem to be in the game, like it used to be. The Intel chips in laptops run hot, use a lot of power and the inbuilt GPUs were having trouble with the higher definition displays. I’d look at the Apple MBPs and think I can get something similar from Dell etc and just put linux on it. But I’d done that in the past …
Geez I’ve missed the elegance of using Apple devices for my main work machine. Things just work like they are supposed to and no more waiting for them power on!
For years my main development machine was a trash can Mac Pro late 2013 model, with a gorgeous 32″ 4K monitor. I had an iPad and a Mac Book Air that I used if I went travelling.
My last laptop was an Asus ROG Zephyrus G14 with 32 GB of ram and a Nvidia RTX 2060 Max-Q. I’ll still use it for simulation development under Unreal Engine. It’s a really powerful machine and I’d left Windows on it for Unreal Engine development. It came with Windows 10 and I upgraded to Windows 11.
But the fan noise is always present and sometimes it just screams at you.
The other annoying thing with the G14 was that the screen wasnt viewable when sitting outside on a sunny day at a cafe. It was fine indoors, but the display nits are lower than the Apple devices.
I live in a warmer sub-tropical environment and if you were cranking the machine up with using the graphics intensely, then the fans are really loud – you needed to wear noise cancelling head phones. Not to mention it go hot to the touch!
I had thought I’d give Microsoft another go after having ditched all Microsoft software over a decade ago. The turning point had been, that I could use Ubuntu, under Windows Subsystem for Linux and that they appeared to be supportive of open source software.
Until Windows 11, I had to revert occasionally back to my Dell XPS 13 that I had before that. This was when I needed an X display into my Linux development servers. Microsoft Visual Studio code (which also leverages the GPU) would die on the Dell XPS 13, with an external monitor attached. The XPS 13 did not have a discrete graphics card but had a great display.
My last MacBookPro was nearly a decade ago. It was just before the retina displays came out and it still had a CD/DVD player (had been converted that bay to a second drive).
I’d decided that I was better off with a more powerful desktop machine back then. Hence the trash can Mac Pro late 2013 model. It served me well and still is quite snappy for every day tasks but compiling is slow now.
Am hoping the new MacBookPro will last me five or so years. I didn’t quite go the full spec, as I new for most activities I do, that this device would be overkill. Yet there is something about getting a better specced machine. I always want a little better then I actually need. I think Apple know this and its not long before the price is really high.
But I was drawn to the M1 Max for its insanely fast memory transfer speeds which is double that of the M1 Pro.
What I’m yet to really explore is Artificial Intelligence on the M1 chip compared to using Nvidia’s CUDA.
So far I’m really liking this MacBookPro, I’ll write a few more posts about how I’ve set it up shortly. I won’t do benchmarking as there are so many YouTube videos and articles about already.
My advice to anyone buying one, is just because you have the money, don’t necessarily go with the highest specced machine that’s within your budget. There is always something new coming out next. These machines are insanely fast and you may just not need that extra ram, GPU cores or storage!
Think carefully about your workload on it before buying and select a model that suits.
The third project in term 2 of the Udacity Robotics Nano Degree program requires students to use ROS and Gazebo along with RTAB-Map, to create a 2D occupancy grid and a 3D octomap of two environments – one supplied and the other student created.
Students extend a previous robot creation to upgrade sensors to supply the necessary sensor messages for RTAB-Map. This leverages the laser scanner, IMU/Wheel Encoder but replaces the camera with a RGB-D camera (ie kinect).
Further the ROS project is created with all links connected with appropriate naming and mapping.
The robot is launched and teleoped around the room to generate a map of the environment.
After successfully mapping the supplied environment, a student defined environment is created and mapped using the same technique.
Introduction
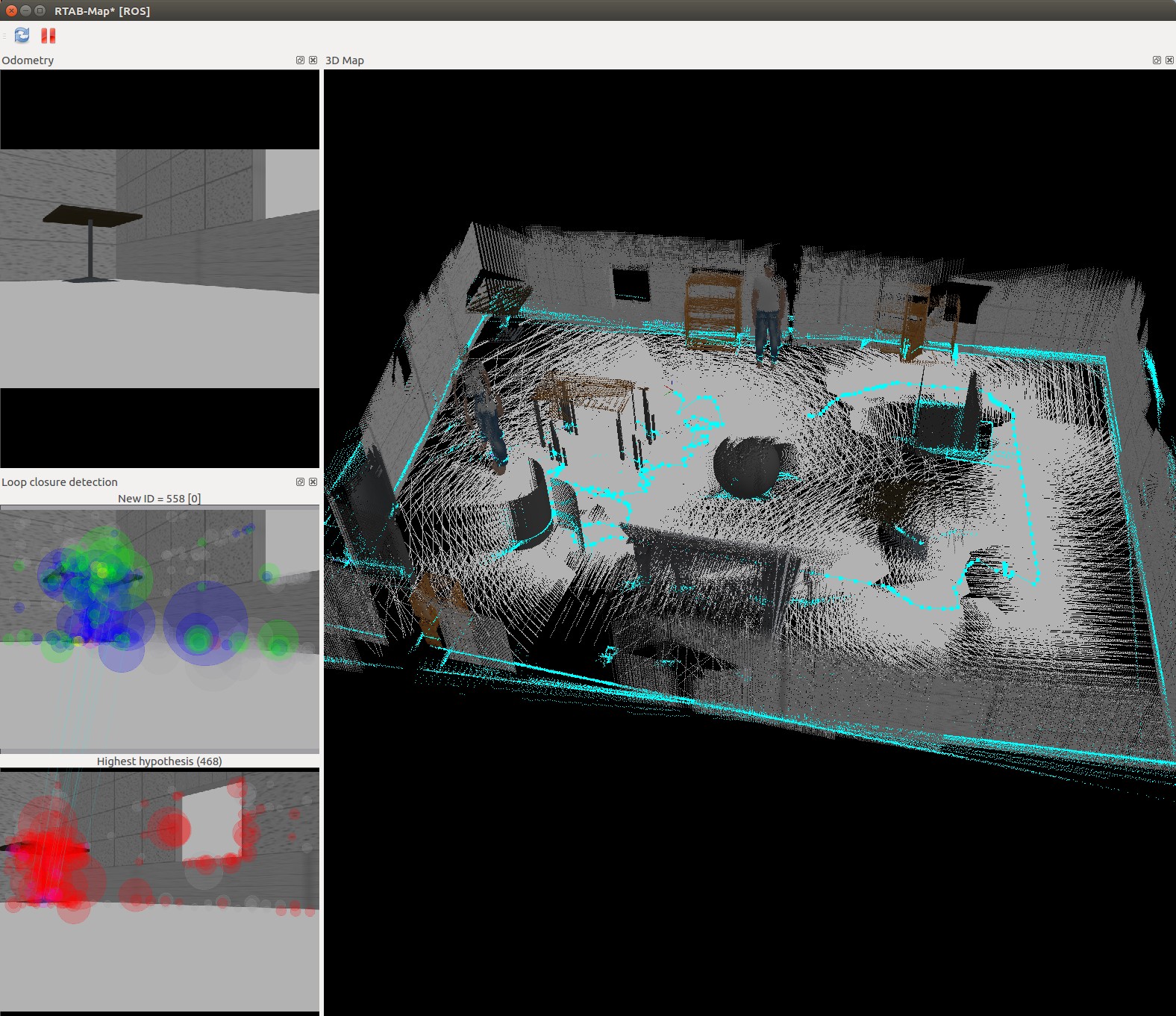
In this project a robot model uses a Simultaneous Localisation and Mapping (SLAM) technique called RTAB-Map (Real-Time Appearance-Based Mapping). It is a RGB-D Graph Based SLAM approach that uses incremental appearance based loop closure detection.
The RTAB-Map ROS wrapper is leveraged with visual representation in real time via rtabmapviz. The resultant map is stored in local database that be later interrogated via rtabmap-databaseViewer.
Background
When a robot encounters a new environment where there is no supplied map, it needs to be able to create this map and localise its pose using it. This combined localisation and mapping process is referred to as SLAM (Simultaneous Localisation and Mapping).
The Occupancy Grid Mapping is a 2D algorithm where each grid cell is identified as Unknown/Undiscovered Zone, Free Zone or Occupied. This represents a slice of the 3D world.
The Grid-Based FastSLAM approach combines SLAM (Synchronised Location and Mapping) using a MCL (Monte Carlo Localisation) Algorithm and an Occupancy Grid Mapping. The main advantage of is the MCL particle filter approach but it always assumes there are known landmark positions. Thus it is unable to model an arbitrary environment.
Graph-SLAM uses a graph based approach to represent poses, features from the environment, motion constraints (between two poses) and measurement constraints (ties together a feature and a pose). It solves the full SLAM problem, it covers the entire path and map and not the most recent pose.
This project uses RTAB-Map, which is a Graph-SLAM approach that uses loop closure with Visual Bag-of-Words for optimisation.
The loop closure detection occurs against working memory to constrain the number of images interrogated. Working memory can be transferred and retrieved from long term memory to reduce complexity. The algorithm used for loop closure detection is SURF (Speeded Up Robust Features).
The possible outputs of RTAB-Map are 2D occupancy grid map, 3D octomap or a 3D point cloud.
Robots are of varying dimensions inclusive of height. Whilst mapping a 2d environment may show where fixed walls etc are it does not take into account height. A robot, that is propelled on the floor, may be able to navigate under some obstacles but not others eg a chair vs a large table. Hence the need to understand the environment from a 3D perspective.
However building a 3D map is more costly then a 2D map. This is not only in terms of Compute & Data costs but also in the cost of the sensors required. However, simple sensors such as a single camera may be cheaper but the algorithms required can be more complex.
Robot Model Configuration
The robot model used was based on the nick_bot created in the previous project as the student robot model (which had a square base with two actuators for the left and right wheels). The camera was removed and replaced with a kinect leveraging the openni_camera ros package with the gazebo controller Openni Kinect.
No changes were made to the hokuyo laser range finder.
An additional joint was added to rotate the kinect data 180%. It was positioned on the front of the robot so as to not interfere with the laser range finder.
The nick_bot configuration files can be found under the urdf directory.
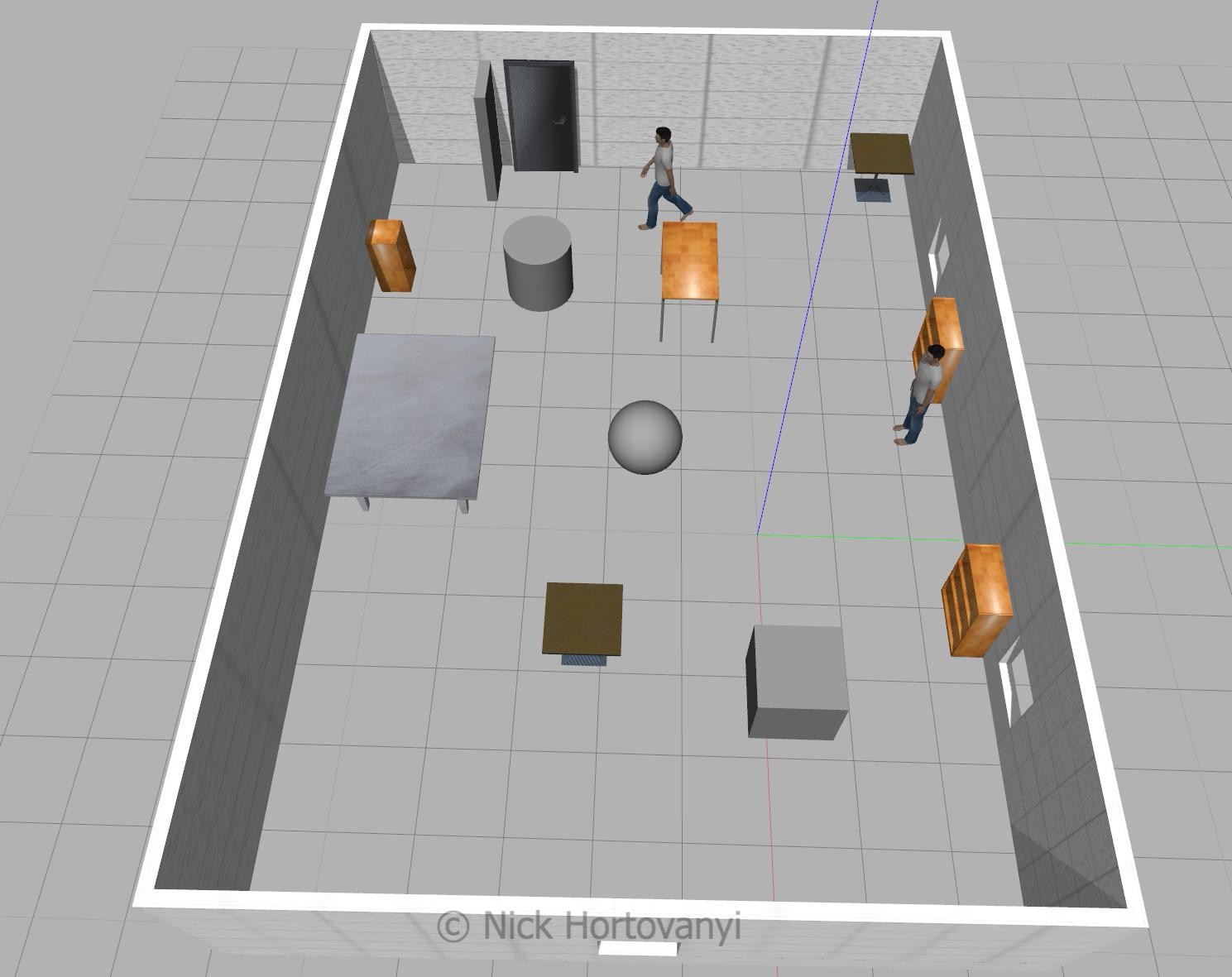
Two worlds were created in gazebo – one supplied as kitchen_dining.world and the other student customised nicks_building.world
kitchen_dining.worldnicks_building.world
Fixtures were selected in nicks_building.world to give sufficient points for the SLUR algorithm to detect distinct points. Items were also placed to ensure that the features could not be mistakenly detected twice ie a person was placed next to one of the bookshelves. Sufficient space was left for the robot to navigate.
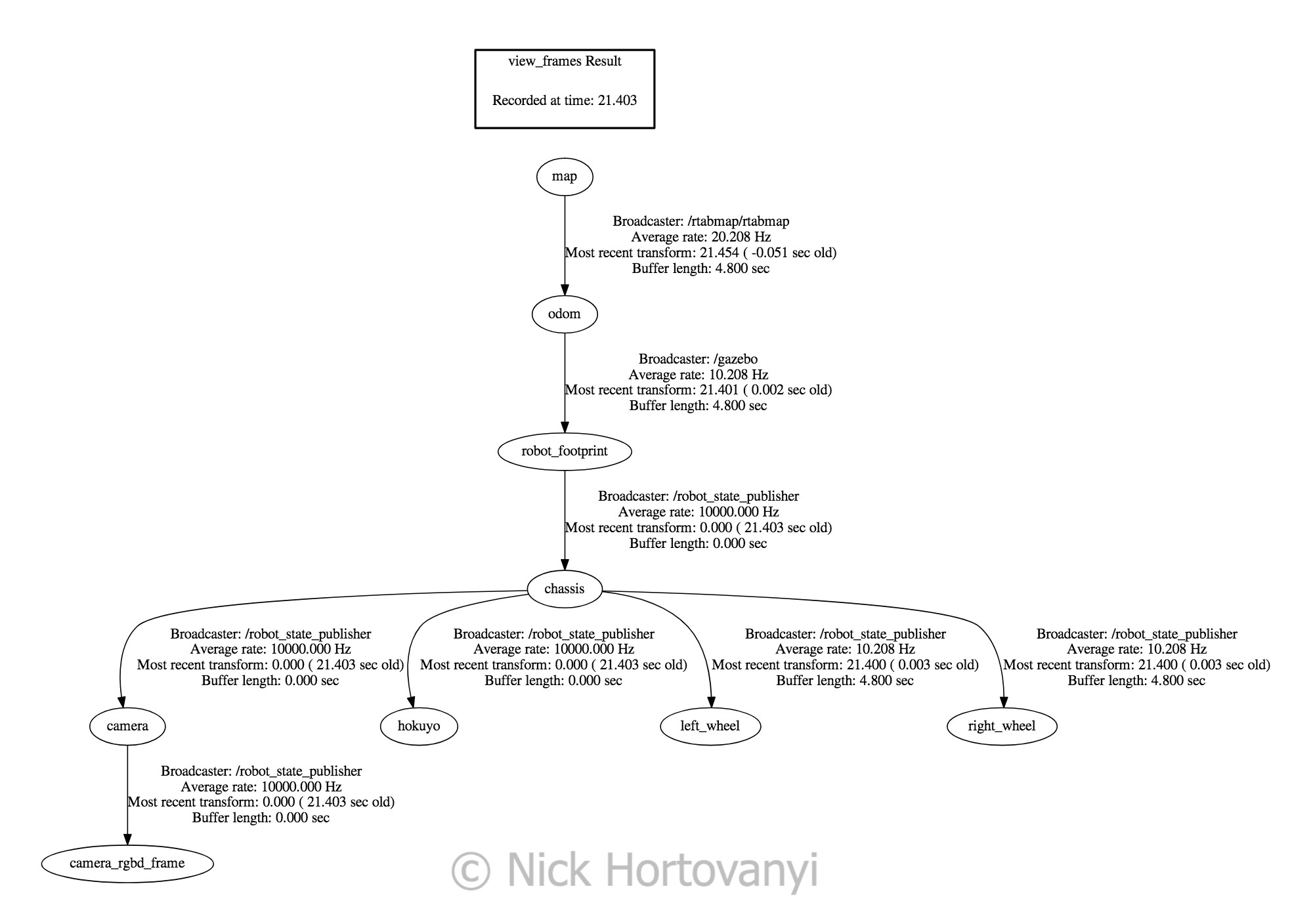
The following tree diagram depicts the package structure and files that made it up.
This tree structure was chosen based on the previous student project that conformed to known gazebo/ros standards with the addition of an output directory to store Udacity project writeup requirements.
Results
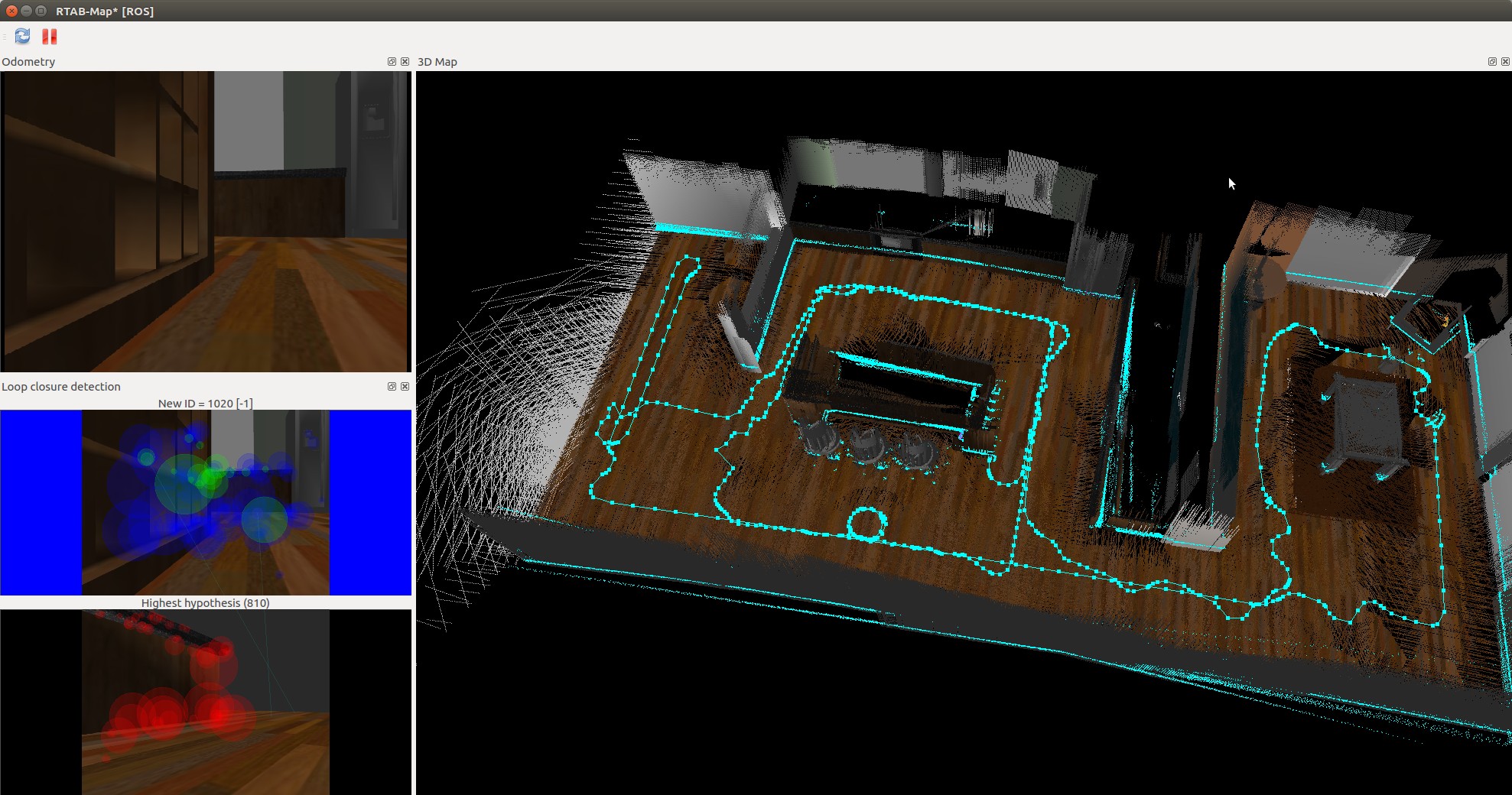
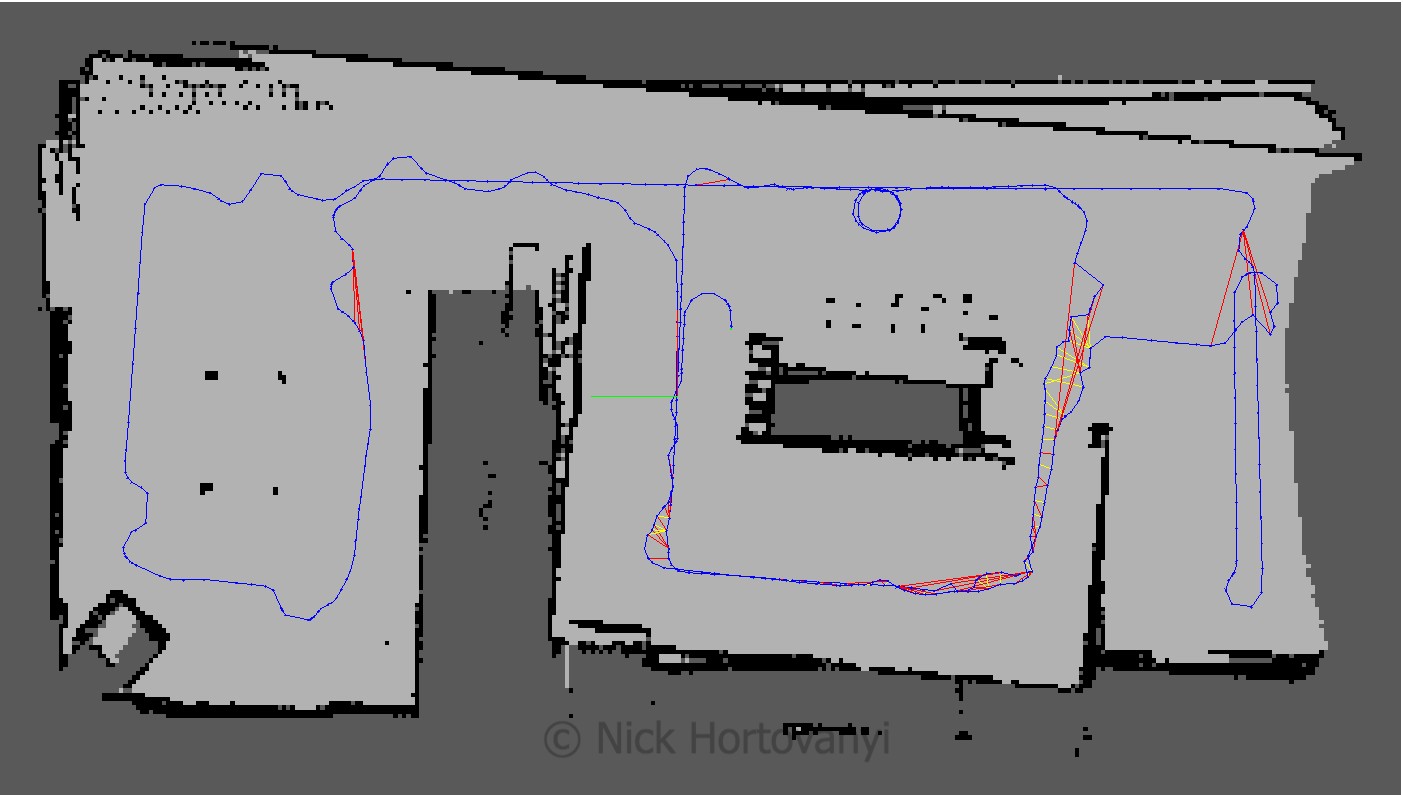
kitchen_dining_3d
kitchen_dining_2d
nicks_building_3d
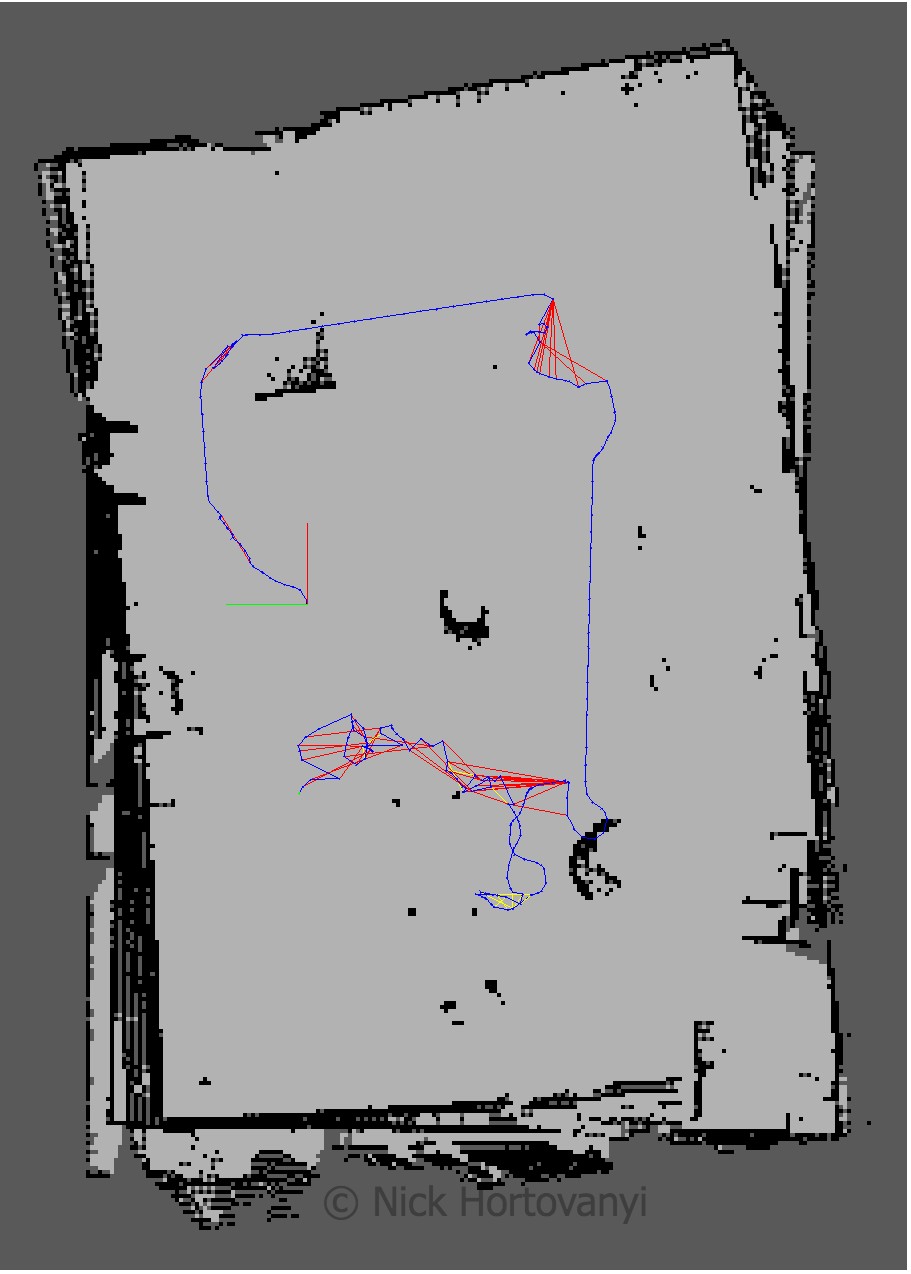
nicks_building_2d
Discusion
The robot was teleoped (navigated via the keyboard) around the room. At some points the robot did not move forward. This appeared to be when it started to perform loop closure. Kp/MaxFeatures was halved to 200 and Vis/MinInliers was reduced from 15 to 10.
However the 3D map quickly started to resemble the physical kitchen dining gazebo model. To improve loop detection rates some, on the spot circles were performed. Of particular note were the features in the main kitchen area. More SURF features were identified there as there was more variation in the surface s.
The nick building gazebo model wall surfaces were tiled, repeatable pattern with lack of other discerning features sometimes caused the loop closure detection to map to an incorrect previous image. This then distorted the map. Additional features were added to achieve a successful map.
The kitchen_dining model performed significantly better then the student created nicks_building model. This was due to the richer and more complex features of the kitchen_dining model.
Future Work
Mapping is important to help understand the world. There are a plethora of sensors and of interest is the about to arrive solid state lidars. As the price point of these sensors continues to drop it will open up opportunities to create richer and more realistic 3D maps at a cheaper price point.
Being able to map an environment cost effectively to create a replicated virtual world will increasingly be important to allow for the training of deep learning models. We are actively looking to do this and then supplant the trained model back into a robot so it can navigate in the original environment that was mapped.
The second project in term 2 of the Udacity Robotics Nano Degree program requires students to complete a hijacked robot scenario using ROS and Gazebo.
Students are to initially follow instructions for a building a reference robot model, before tuning the localisation parameters satisfactorily such that the robot within the Gazebo maze simulation can reach an end goal.
After completion of that, a new robot model is created with alterations to the base and position of sensors. Whereby it uses the same simulation and must reach the same end goal.
Introduction
In this project a robot model has to use localisation to work out where it is. It creates a rolling local map using laser range sensors. The local map in turn is used to navigate towards a navigation goal.
The navigation stack utilised move_base. It provides a local cost map, as the robot moves, in relation to a global cost map to define a continuous path for the robot to move along.
This project utilises Gazebo to create a simulation with a map provided by Clearpath Robotics
Once the robot has reached the navigation goal, the objective of the project has been achieved.
Background
A robot needs to understand where it is in a world, to be able to make navigation plans to get from point a, to point b, whilst avoiding obstacles. The process of understanding “where am I?” (from a robots perspective) is called localisation.
This project uses a localisation package built into ROS called Adaptive Monte Carlo Localisation (AMCL) to assist with the robot in a scenario to work out where it is. Hence the project name “Where am I?”.
AMCL is a variant of the Monte Carlo Localisation (MCL) which was learnt in the course material. MCL uses particles to localise the robot pose. It has several advantages over using Extended Kalman Filters (EKF) such as uses raw measurements (ie from lasers), is not reliant on gaussian noise, is memory and time efficient, and can perform global localisation.
The AMCL package adaptively alters the number of particles used, which has the advantage of reducing the computational overhead required.
Results
We first completed this exercise using the class room example which is named udacity_bot. Then a different version was created where the base and sensor locations were changed. This was named nick_bot and was launched using udacity_world_nick.launch.
The final results of when it reached the goal state follow.
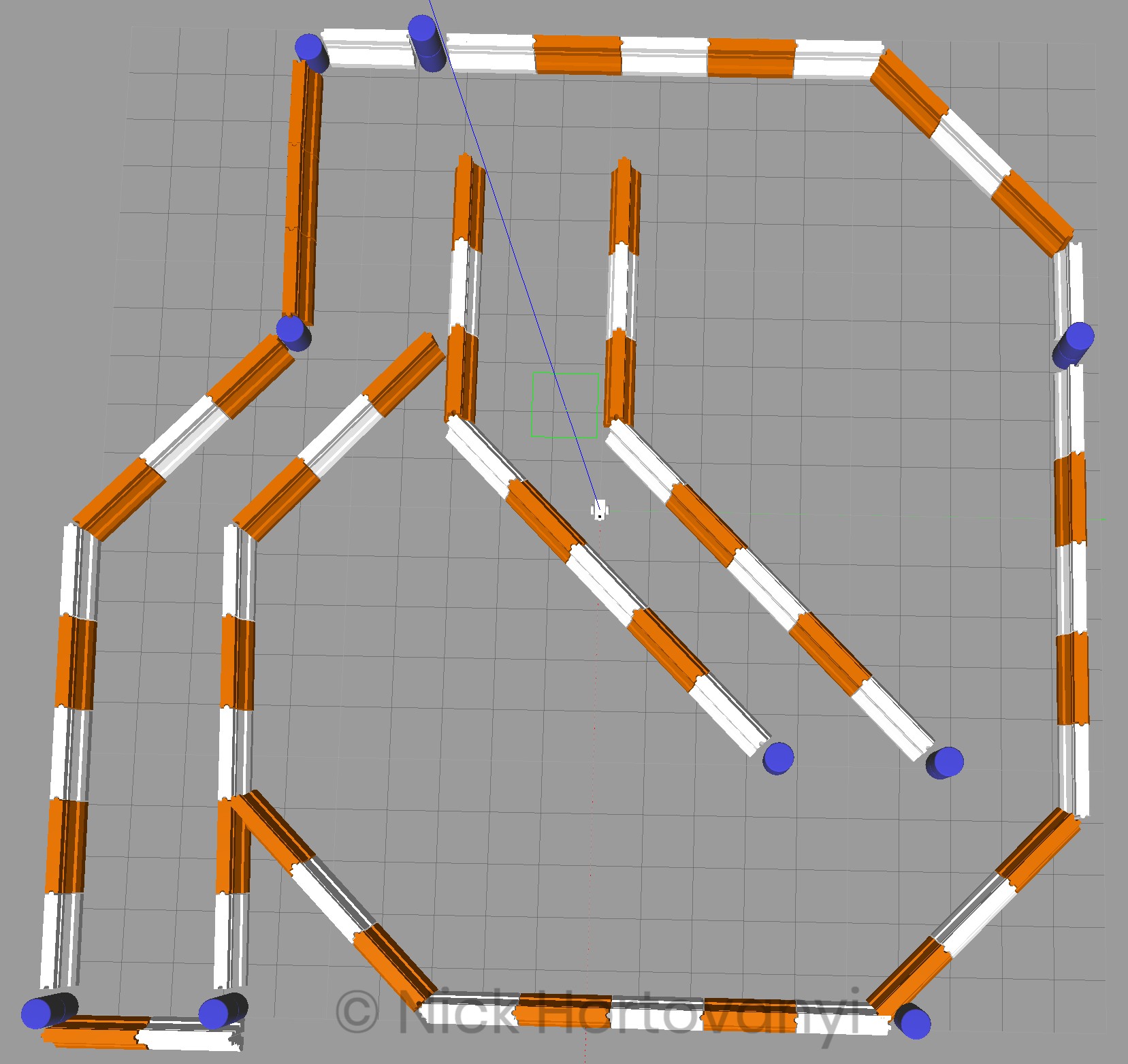
udacity_bot
udacity_bot rviz
nick_bot
nick_bot rviz
Model Configuration
This discussion is for the configuration of nick_bot.
The nick_bot was a square version of the rectangle based udacity_bot. The laser sensor was moved to the front of the robot.
The amcl_nick.lauch. Wherever possible the same configuration and parameters as the udacity_bot used amcl.launch.
min_particles was set to 25 and max_particles to 200 to not heavily utilise CPU. A higher max_particles did not improve initial ability of the robot to find itself with certainty.
odom_alpha1 to odom_alpha4 were trial & error values and changed from the default of 0.2 (there was not much documentation about).
The laser model parameters were left as default. There appeared no reason to change them as they were clearly visible on the above rviz visualisations and aligned to the barriers.
The yaw_goal_tolerance and xy_goal_tolerance were doubled from the default values to allow for additional flexibility in trajectory planning.
transform_tolerance was set 1.25 and update_frequency to 3.0 for both local and global.
obstacle_range was set to 1.5, raytrace_range to 4.0 and inflation_radius to 0.65 to enable sufficient space on the cost map for the robot to navigate.
robot_radius was set to 0.4 in this model to allow for the larger square design.
The local publish_frequency was set to 3.0 with the global to 5.0 This configuration in conjunction with 15.0 x 15.0 sized local cost map was able to function within the performance constraints of the system used. Increasing the size of the local cost map utilise significant more computer power and missed the time windows for publish_frequency.
sim_time was set to 4 as there appeared sufficient compute resource to estimate a trajectory out 4 seconds.
meter_scoring was enabled to ensure pdist_scale used meters.
pdist_scale was set to 0.5 being less than the default of 0.6. Default and higher values appeared to cause the robot to sometimes get stuck.
Discussion
The robot model was able to on most runs navigate successfully to the goal. The route taken at times could have been shortened. However further research is required into the ROS packages used to be able to tune it to achieve such. Often the observed path taken did not appear to be the most cost affective and when it missed the target goal, it would do a large sweep before re-approaching the target.
The AMCL routine appeared to quickly gain certainty about the locality of the robot. It was the rest of the navigation stack and move_base that needed further tuning.
In the kidnapped robot problem where by a robot is positioned in an arbitrary location, AMCL would be able to adapt the number of particles used to gain certainty of the robot’s location. In addition AMCL does not rely on landmarks, but on laser based maps, laser scans and transform messages to output pose estimates.
Moreover in an environment, where by there weren’t known landmarks, the AMCL has advantages over the Extended or Unscented Kalman Filter based approaches. These environments would include those with no known map (ie its the first time being navigated) or in highly unstructured environments with lots of moving structures over time eg shopping centres with popup shops in the aisles with significant foot traffic.
Future Work
The size of the local cost map had a significant impact on performance. Higher values decreased the ability to publish within the frequency required. In addition higher particle numbers whilst increasing CPU load did not reduce the time taken for the AMCL to be certain about the robots locality.
A square designed robot model as opposed to a rectangular design appeared to enable the robot to rotate more affectively around its base. Other wheel components are available but they did not publish ODOM information. Hence additional sensors might be required with further investigation into the impact of the removal of ODOM readings required.
A laser GPU gazebo component was available. This may enable reduced CPU load by moving the workload to the GPU.
A LIDAR unit would give a more complete map of the world around the robot. One could also look to include more laser sensors to map behind and to either side of the robot. This should facilitate with the creation of a more complete motion plan without the need for the robot to map it first.
When implementing this type of project on real hardware, the mobile nature of a robot, requiring it also to contain its own power sources, means that efficient usage of a CPU and GPU are a must. The higher the utilisation, the less effective time the robot will have to perform activities.
Thus whilst implementing more sensors may provide a more detailed and accurate map, in the field this would further drain the power source. Hence careful consideration is needed for the number of sensors, the total power consumption of the sensors and compute work loads, as well as the impact the quantity of data has to the compute utilisation rates whilst mobile.
If there no significant improvement in performance for the design objective and operational goals of the robot, then a more minimalist sensor and localisation cost map configuration may be appropriate.
The first project in term 2 of the Udacity Robotics Nano Degree program requires students to initiate their own inference project inclusive of data acquisition. The project builds on the initial reference project for digit image recognition inside the supplied Nvidia Digits environment.
The project ideas are the student’s own and must have at least 3 classification categories eg defective item vs normal item with classes (no item, defective item, normal item).
Introduction
Pedestrian and bicycle lanes are often crowded with many people not aware of or selectively ignoring the signage. It can lead, to an unsafe or hazardous environment, for all that use it with police officers reluctant to enforce the rules via fines.
The concept selected, in this project, was to classify an image as either containing a pedestrian, not-pedestrian or background.
The goal being, that some sought of visual representation via a screen with a smile or a frown, could be given to act, as a robotic traffic controller. Other potential instantiation could include a torso using upper body movement to signal good or bad behaviour.
Background / Formulation
During the initial inference task, on supplied data, GoogLeNet was chosen as it had a good inference rate per image with reasonable accuracy. Using the Adam Optimiser with an initial learning rate of .001, it was able to meet the numerical requirements of inference time below 10 ms with accuracy > 75%. The input used for this reference model in Nvidia’s DIGITS was 256×256 3 channel colour images.
Similar requirements of accuracy would be required for this inference project. It was not necessary to be a 100% accurate as a smiling or frowning face at least makes people think about what they are presently doing. It was not going to be used to issue fines or other enforcement notices. Video cameras would stream image data between 24-30fps which means that an Inception, VGG model and some ResNet models may be too slow for inference in real time.
With the additional perception that colour could also be useful in detecting pedestrian vs not-pedestrian, GoogLeNet was again chosen for this project using the Adam Optimiser with an initial learning rate of .001.
Other experimentation with using a higher initial learning rate of 0.01 with the above configuration over 5 epochs did not improve validation accuracy which remained around 50%. Similarly AlexNet over 5 epochs with the same Adam optimiser and learning rate did not increase accuracy. One experiment was performed using GoogLeNet with RMSProp optimiser and an initial learning rate 0.001 which did not result in improvement of validation accuracy but did have significantly higher training loss so was also not progressed.
Data Acquisition
A GoPro mounted on a tripod was used. It was positioned on the side of a pedestrian esplanade at Surfers Paradise, Gold Coast, Australia. As it was summer holidays a reasonable amount of varying traffic was expected. The background looked over the ocean to have a consistent image where there was not going to be movement (besides cloud) other then what was on the esplanade.
GoPro Data Acquisition
Three angles (facing left, centre and right) were used for capture per the following graphic:
Camera Background Angles
The GoPro was setup in wifi mode for time lapse capture, which was controlled via an iPhone. Initially 2 seconds elapsed was used, which eventually was dropped to 0.5. Using the GoPro time-lapse feature, meant that individual jpeg files were captured as opposed to a MP4 video.
Using the iPhone to control the control, meant that I could visualise what was coming before starting the next capture batch.
After the capture the images were manually placed into a directory for each category.
Image data was captured for the three categories background (322), pedestrian (349) and not-pedestrian (94). It became apparent at this time that not enough not-pedestrian image data had been captured. This was mainly due to the initial 2 seconds elapsed time used. Due to high heat and humidity of the Australian summer, in the following afternoons, it was not practical to capture more data from the same spot.
Skateboarders were placed in the pedestrian category.
An example of a pedestrian and not-pedestrian follows. Background examples are as above.
not-pedestrian examplepedestrian example
A jupyter notebook was used to create a generator to supplement the data by randomising the image brightness, randomly flipping the images vertically and jittering the images randomly
in the x (by or – 25 pixels),y (by or – 50 pixels) planes to create supplemental image data.
The images were also resized to 256 x 256 and saved as PNGs.
The final generated supplemental data had 2000 not-pedestrian, 1000 pedestrian with 1000 background images.
Results
The initial inference task, on supplied data, GoogLeNet was chosen as it had a good inference rate per image with reasonable accuracy. Using the Adam Optimiser with an initial learning rate of .001, it was able to meet the numerical requirements of inference time below 10 ms (~5 ms actual) with accuracy > 75% (75.40984% actual).
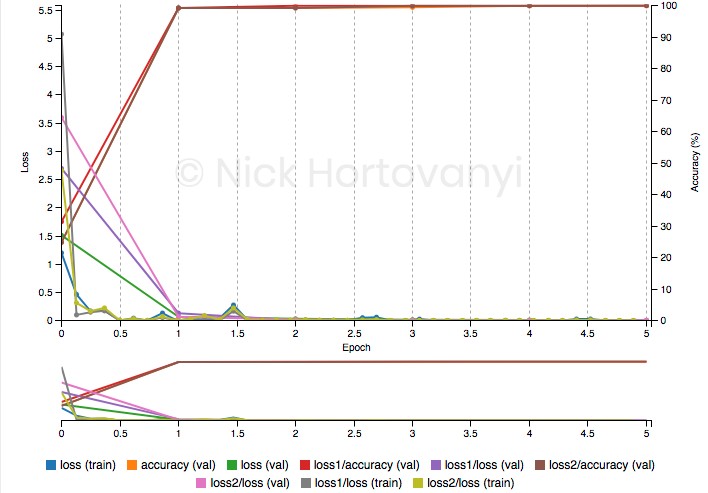
During training of the initial inference task 100% validation was achieved per the following training graph after 5 epochs.
Training Graph
However similar training results were not achieved for this inference project on captured data. The following training graph after 10 epochs follows
Project Training Graph
This had a validation accuracy of ~50%.
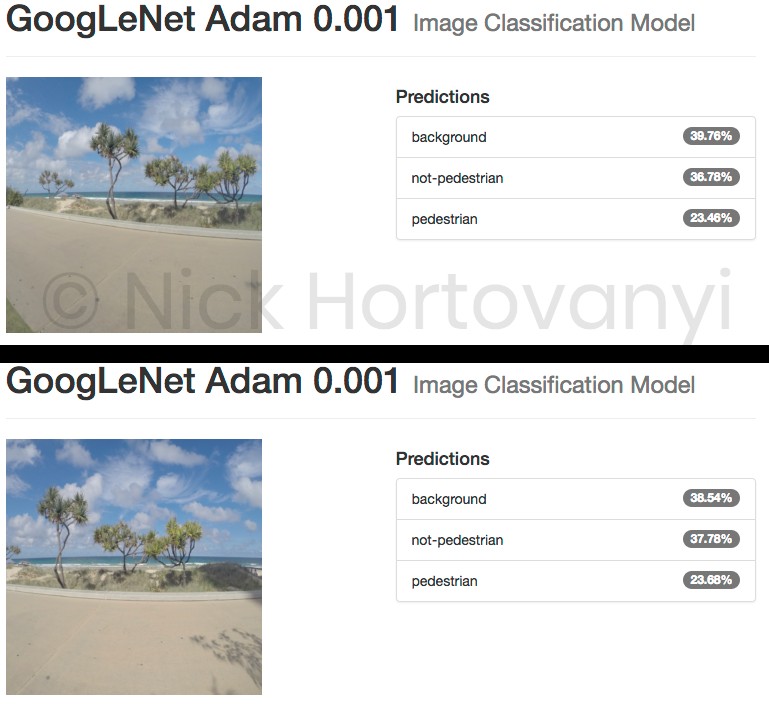
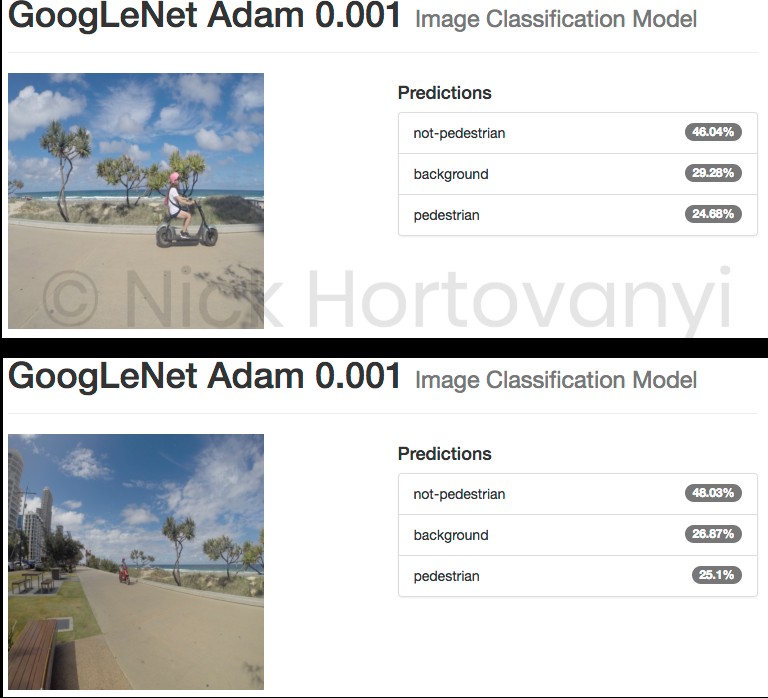
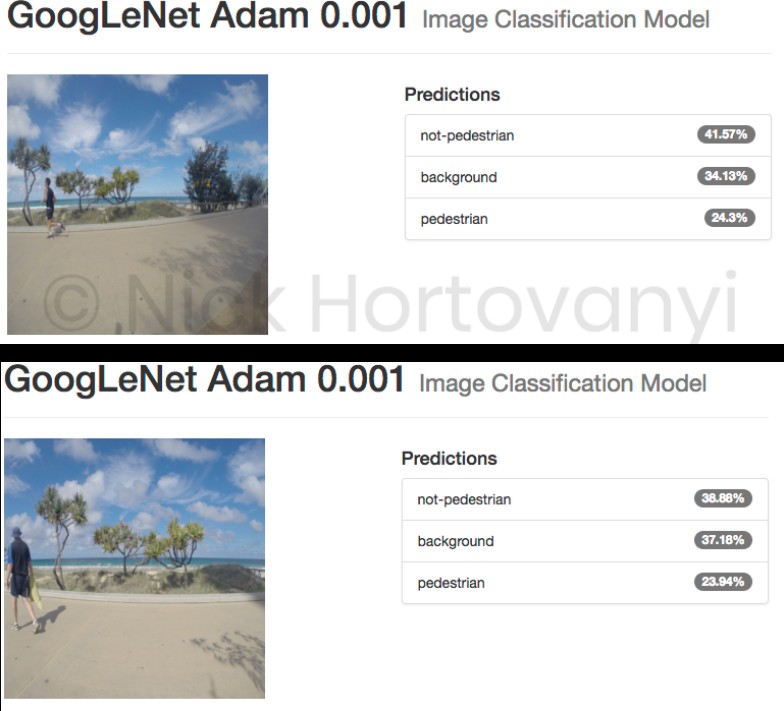
The following are the results of two randomly selected images per classification category uploaded as original high-res jpeg images from the GoPro.
The indicative inspection suggests that there was insufficient data to get a result > 75% for this project at this time. It also appears that the model as trained can not distinguish between pedestrian and not-pedestrian but can distinguish a background image.
Inference times were not tested separately as GoogLeNet is known to have a fast inference time which would be sufficient for this project.
Discussion
The dataset collected did not have enough sample images. This was as a result of using time-lapse with too high a value. In hind site, a combination of 0.5-1 sec time-lapse for slow moving pedestrians with >30 FPS video for higher speed moving non-pedestrians would of allowed for more data.
Of note is when there is a combination of non-pedestrian and pedestrian in the same frame led to the though of potentially using object detection first to find a window to classify. This was not implemented in this version however it would have led to a more accurate ability to classify as the background would be eliminated ie if no objects detected it must be a back ground image.
For this project the duration of a consistent display of say 2 to 3 seconds to the passing pedestrian and non-pedestrian traffic would drive the ultimate inference time required. It would suggest that it needs to be an average classification of a 1 second or two when leading up to where the video is captured.
Of note were skateboarders. There is only the skateboard (which has a low profile in the image) that distinguishes it from a pedestrian as velocity is not taken account with single images.
In addition the depth (away from the camera) of the traffic passing by changes the size of the object that needs to be classified. Pre-filtering and zooming these to a consistent size may improve accuracy.
Future Work
Whilst the project did not achieve a good train validation result, it has laid the foundation for future iterations. There is potential to capture more data and use object detection to refine the training and inference steps of the project.
Providing soft means to monitor and influence peoples decisions regarding signage and the associated rules for safe usage of (non-vehicle) transit paths would potentially be received positively by the community. Police forces lack the budget or people to enforce these rules and they are reluctant to issue minor infringement notices (with potential to destroy good will in the community). Hence a more subtle robotic person could improve the situation in a cost effective means.
The size of this market is unknown. However speed cameras using smiley and sad faces are used around the local area where I live. They are having a positive impact on driver behaviour in the areas deployed. Thus there is a market for a more community friendly and automated means to impact on behaviour.
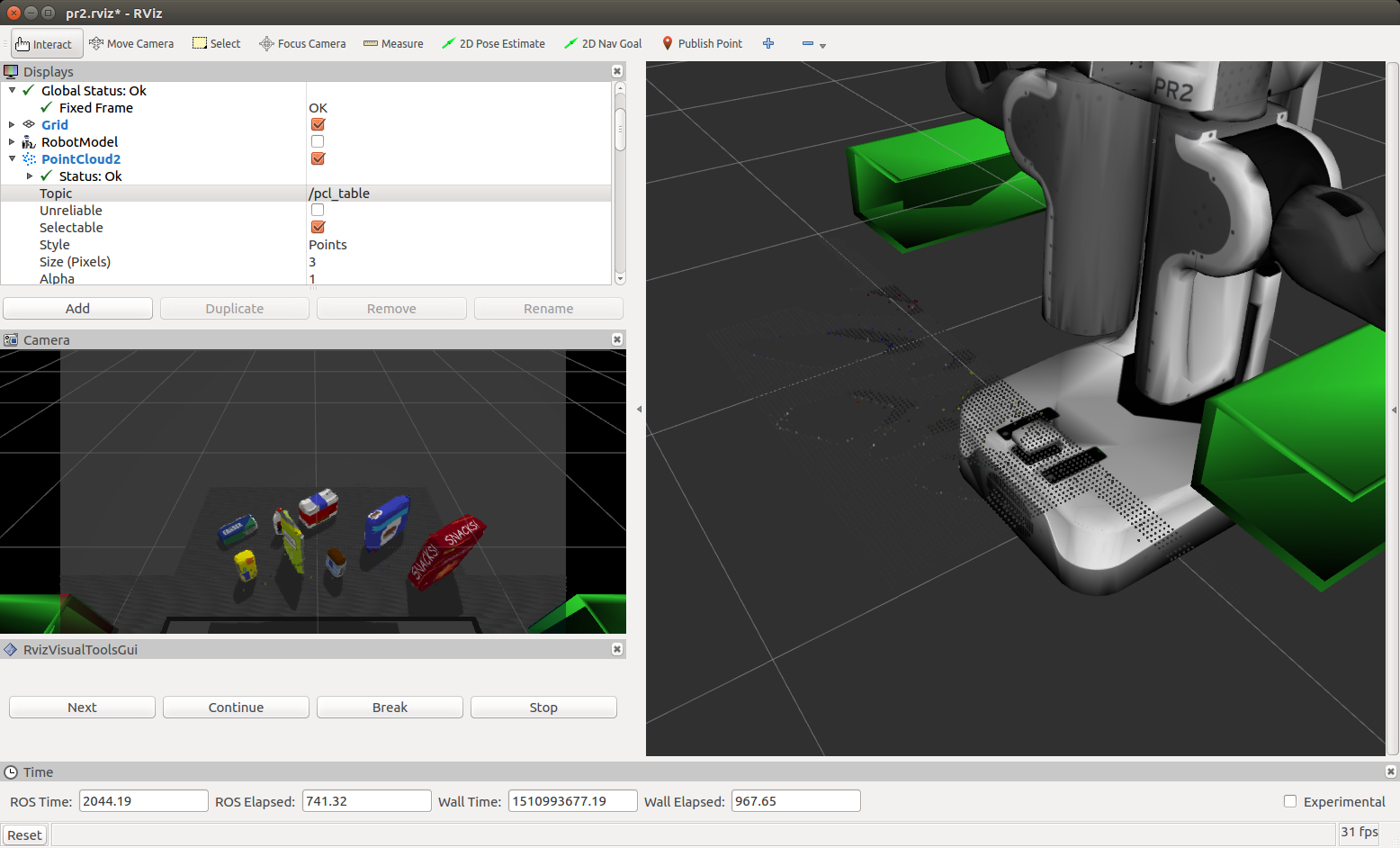
Complete Exercise 1 steps. Pipeline for filtering and RANSAC plane fitting implemented.
The 3D perception pipeline begins with a noisy pc2.PointCloud2 ROS message. A sample animated GIF follows:
Noisy Camera Cloud
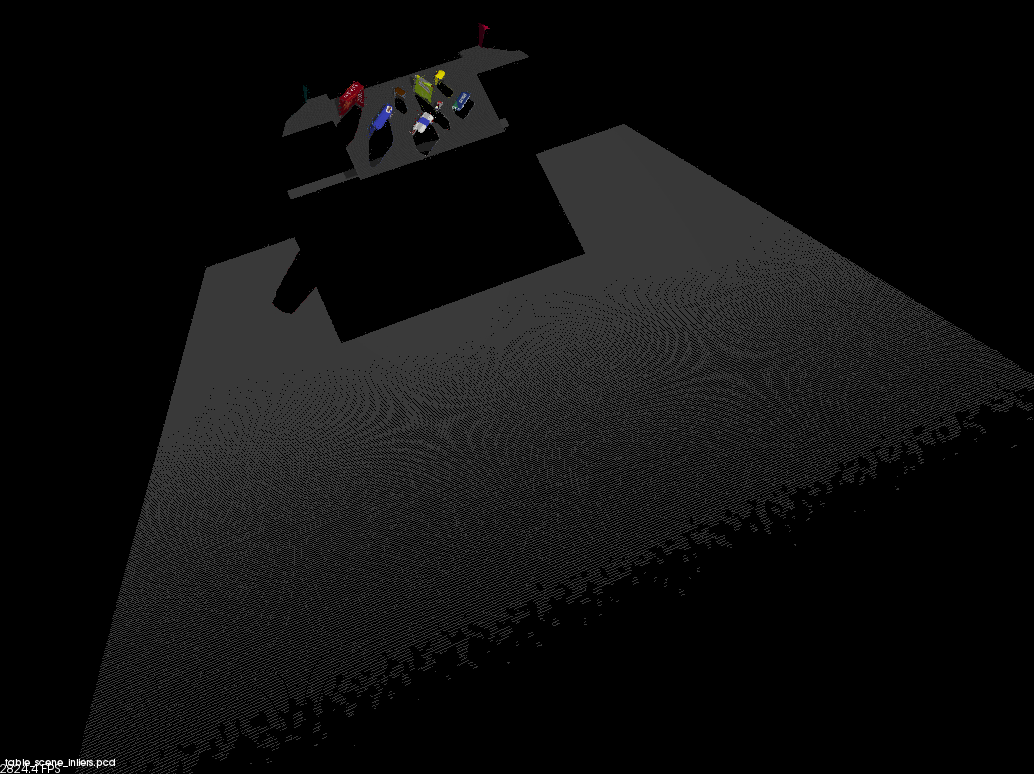
After conversion to a PCL cloud a statistical outlier filter is applied to give a filtered cloud.
The cloud with inlier ie outliers filtered out follows:
Cloud Inlier Filtered
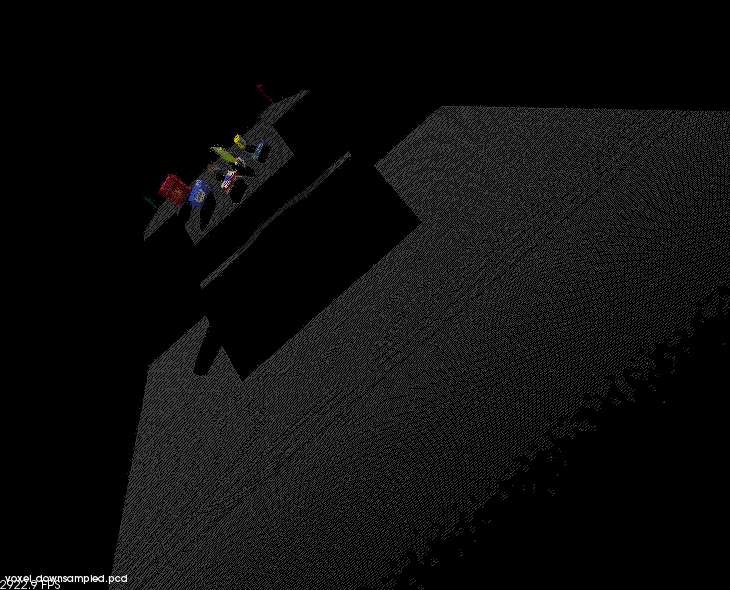
A voxel filter is applied with a voxel (also know as leaf) size = .01 to down sample the point cloud.
Voxel Downsampled
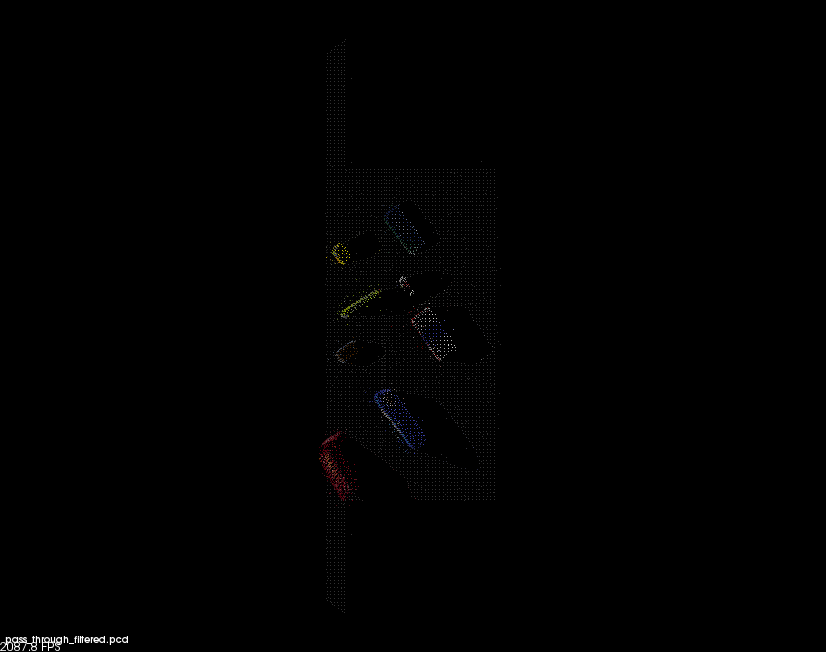
Two passthrough filters one on the ‘x’ axis (axis_min = 0.4axis_max = 3.) to remove the box edges and another on the ‘z’ axis (axis_min = 0.6axis_max = 1.1) along the table plane are applied.
Passthrough Filtered
Finally a RANSAC filter is applied to find inliers being the table and outliers being the objects on it per the following
# Create the segmentation object
seg = cloud_filtered.make_segmenter()
# Set the model you wish to fit
seg.set_model_type(pcl.SACMODEL_PLANE)
seg.set_method_type(pcl.SAC_RANSAC)
# Max distance for a point to be considered fitting the model
max_distance = .01
seg.set_distance_threshold(max_distance)
# Call the segment function to obtain set of inlier indices and model coefficients
inliers, coefficients = seg.segment()
# Extract inliers and outliers
extracted_inliers = cloud_filtered.extract(inliers, negative=False)
extracted_outliers = cloud_filtered.extract(inliers, negative=True)
cloud_table = extracted_inliers
cloud_objects = extracted_outliers
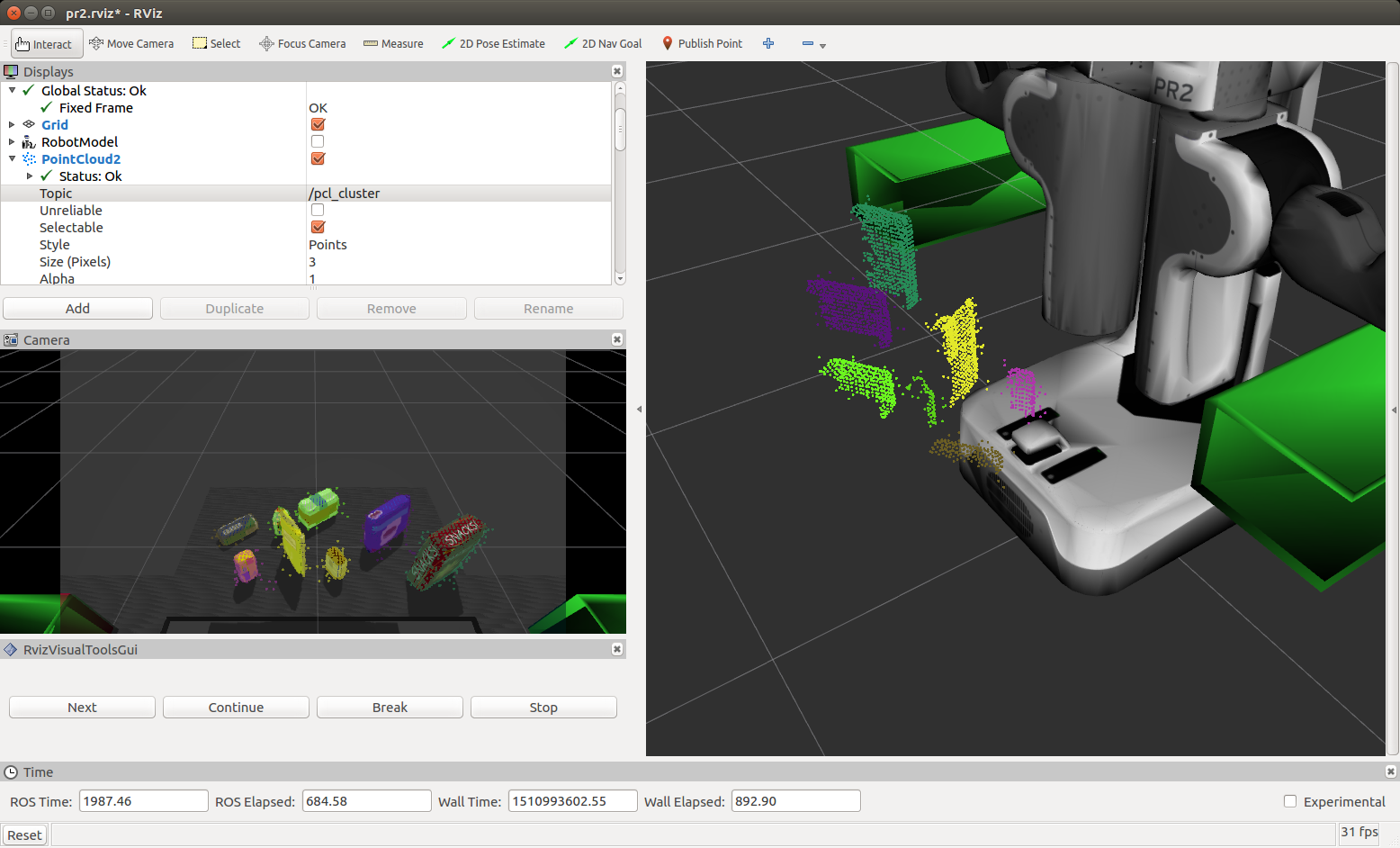
Complete Exercise 2 steps: Pipeline including clustering for segmentation implemented.
Euclidean clustering on a white cloud is used to extract cluster indices for each cluster object. Individual ROS PCL messages are published (for the cluster cloud, table and objects) per the following code snippet:
# Euclidean Clustering
white_cloud = XYZRGB_to_XYZ(cloud_objects)
tree = white_cloud.make_kdtree()
# Create a cluster extraction object
ec = white_cloud.make_EuclideanClusterExtraction()
# Set tolerances for distance threshold
# as well as minimum and maximum cluster size (in points)
ec.set_ClusterTolerance(0.03)
ec.set_MinClusterSize(30)
ec.set_MaxClusterSize(1200)
# Search the k-d tree for clusters
ec.set_SearchMethod(tree)
# Extract indices for each of the discovered clusters
cluster_indices = ec.Extract()
# Create Cluster-Mask Point Cloud to visualize each cluster separately
#Assign a color corresponding to each segmented object in scene
cluster_color = get_color_list(len(cluster_indices))
color_cluster_point_list = []
for j, indices in enumerate(cluster_indices):
for i, indice in enumerate(indices):
color_cluster_point_list.append([white_cloud[indice][0],
white_cloud[indice][1],
white_cloud[indice][2],
rgb_to_float(cluster_color[j])])
#Create new cloud containing all clusters, each with unique color
cluster_cloud = pcl.PointCloud_PointXYZRGB()
cluster_cloud.from_list(color_cluster_point_list)
# Convert PCL data to ROS messages
ros_cloud_objects = pcl_to_ros(cloud_objects)
ros_cloud_table = pcl_to_ros(cloud_table)
ros_cluster_cloud = pcl_to_ros(cluster_cloud)
# Publish ROS messages
pcl_objects_pub.publish(ros_cloud_objects)
pcl_table_pub.publish(ros_cloud_table)
pcl_cluster_pub.publish(ros_cluster_cloud)
/pcl_objects/pcl_table/pcl_cluster
Complete Exercise 3 Steps. Features extracted and SVM trained. Object recognition implemented.
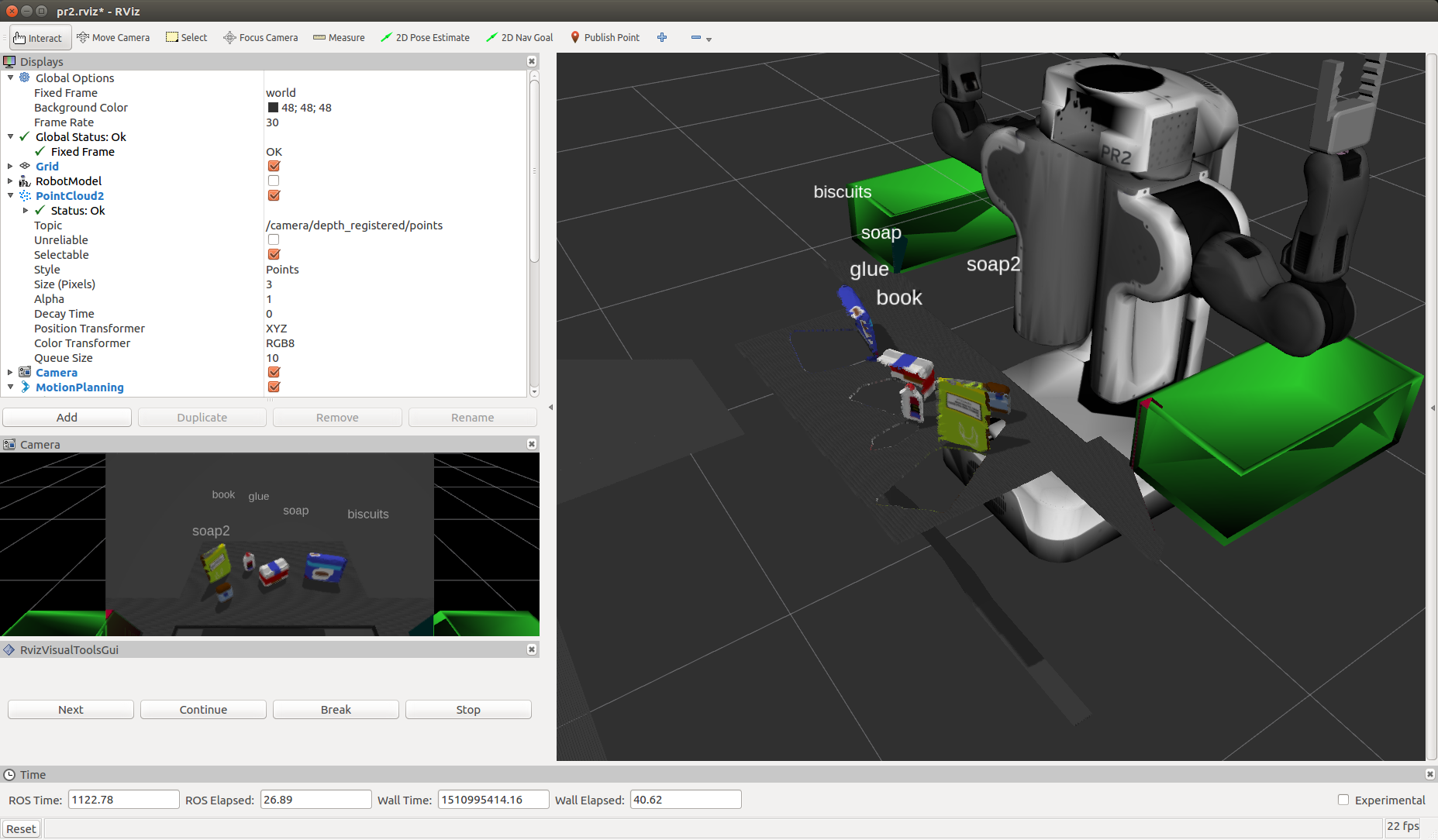
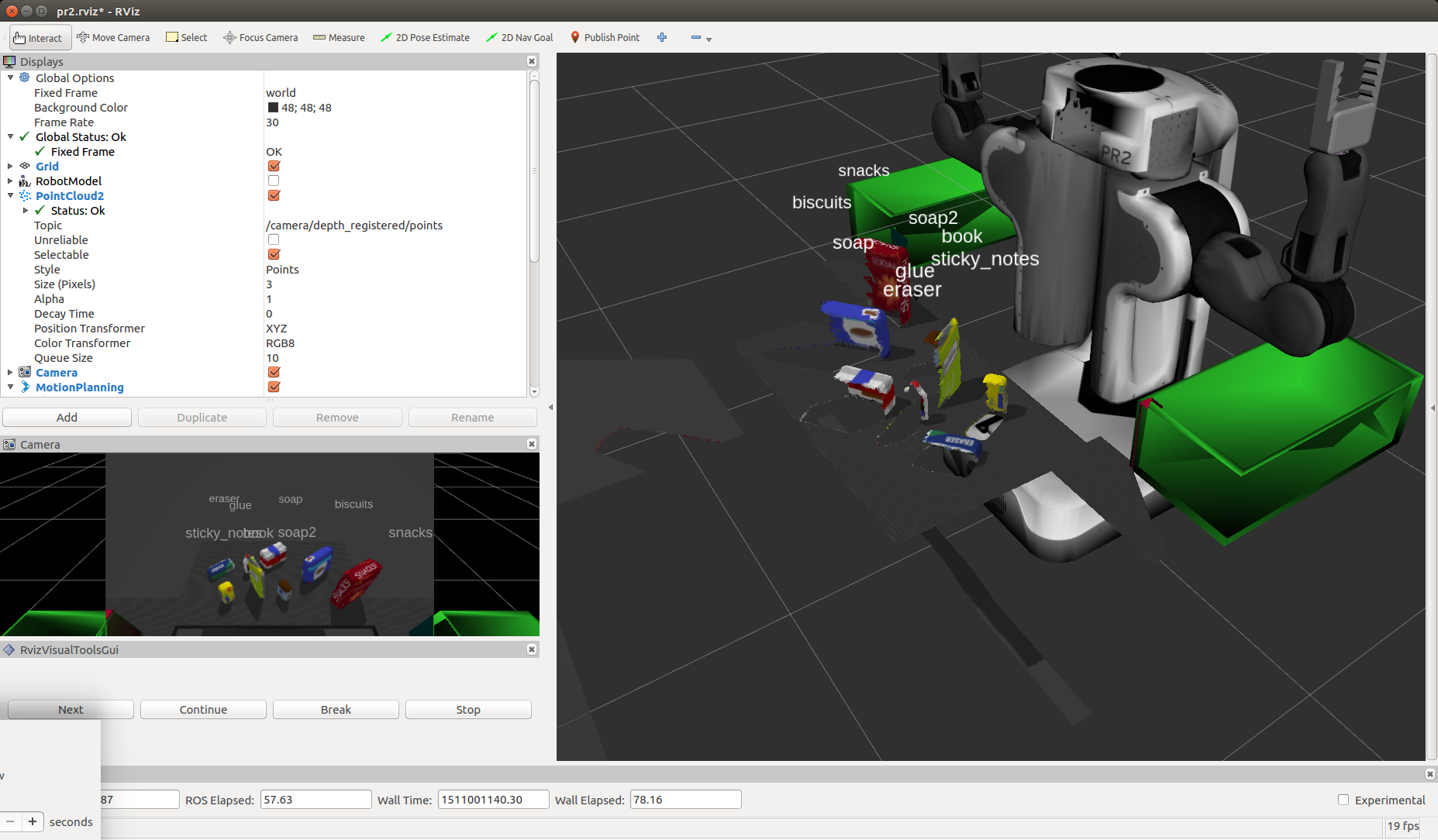
Features were captured in the sensor_stick simulator for [‘biscuits’, ‘soap’, ‘soap2’, ‘book’, ‘glue’, ‘sticky_notes’, ‘snacks’, ‘eraser’] model names with 40 sample of each captures.
hsv color space was used a combination of color and normalised histograms per
The colour histograms where produced with 32 bins in the range (0, 256) and the normal values with 32 bins in the range (-1, 1.).
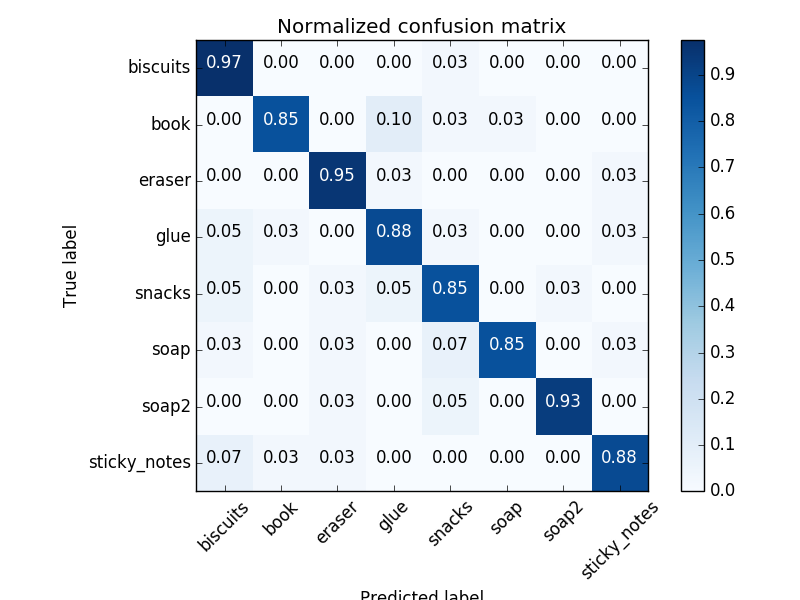
The full training.set was used in train_svm.py where I replaced the standard sum.SVC(kernel='linear') classifier with a Random Forest based classifier.
It dramatically improved training scores per the following normalised confusion matrix:
normalised confusion matrix
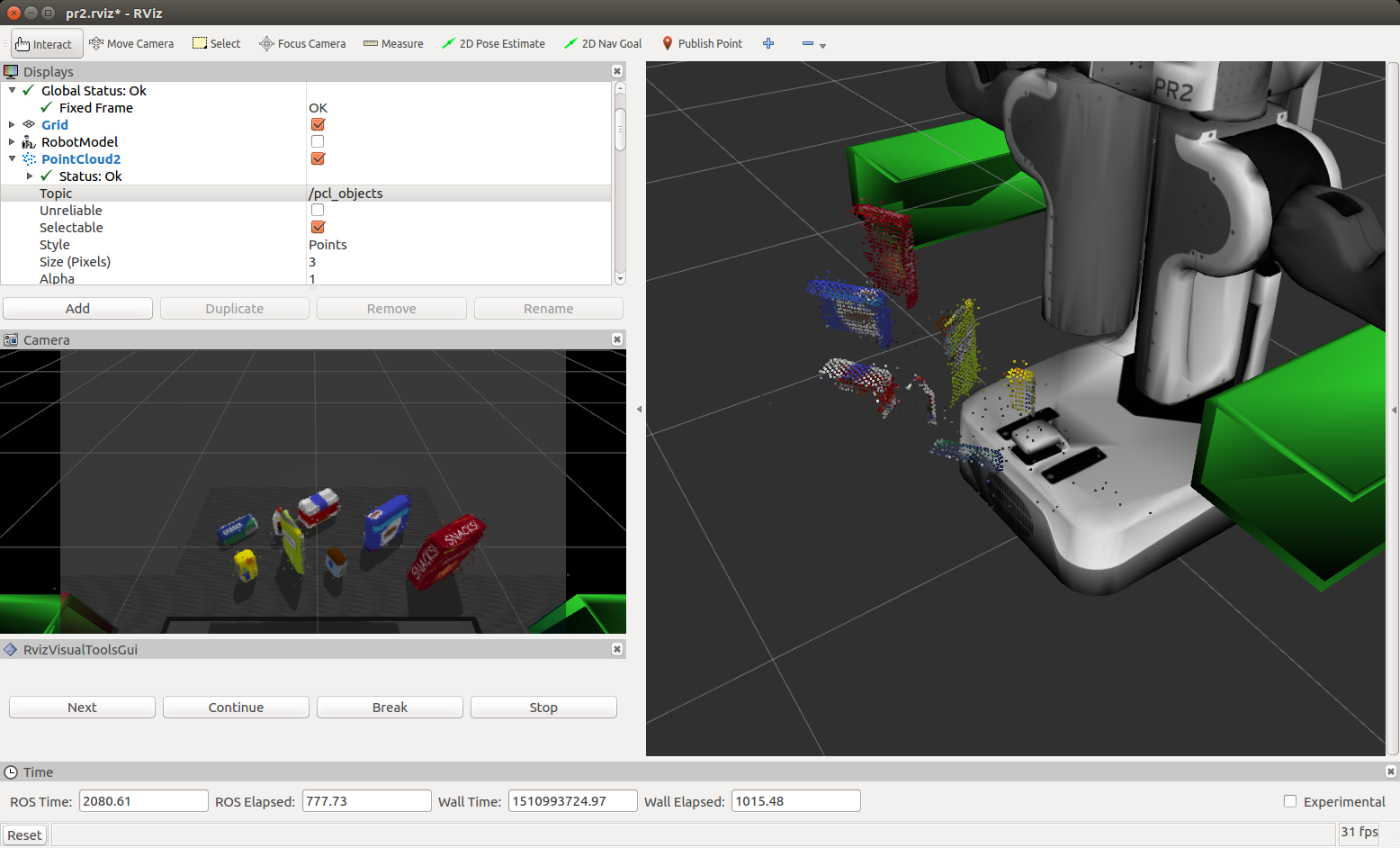
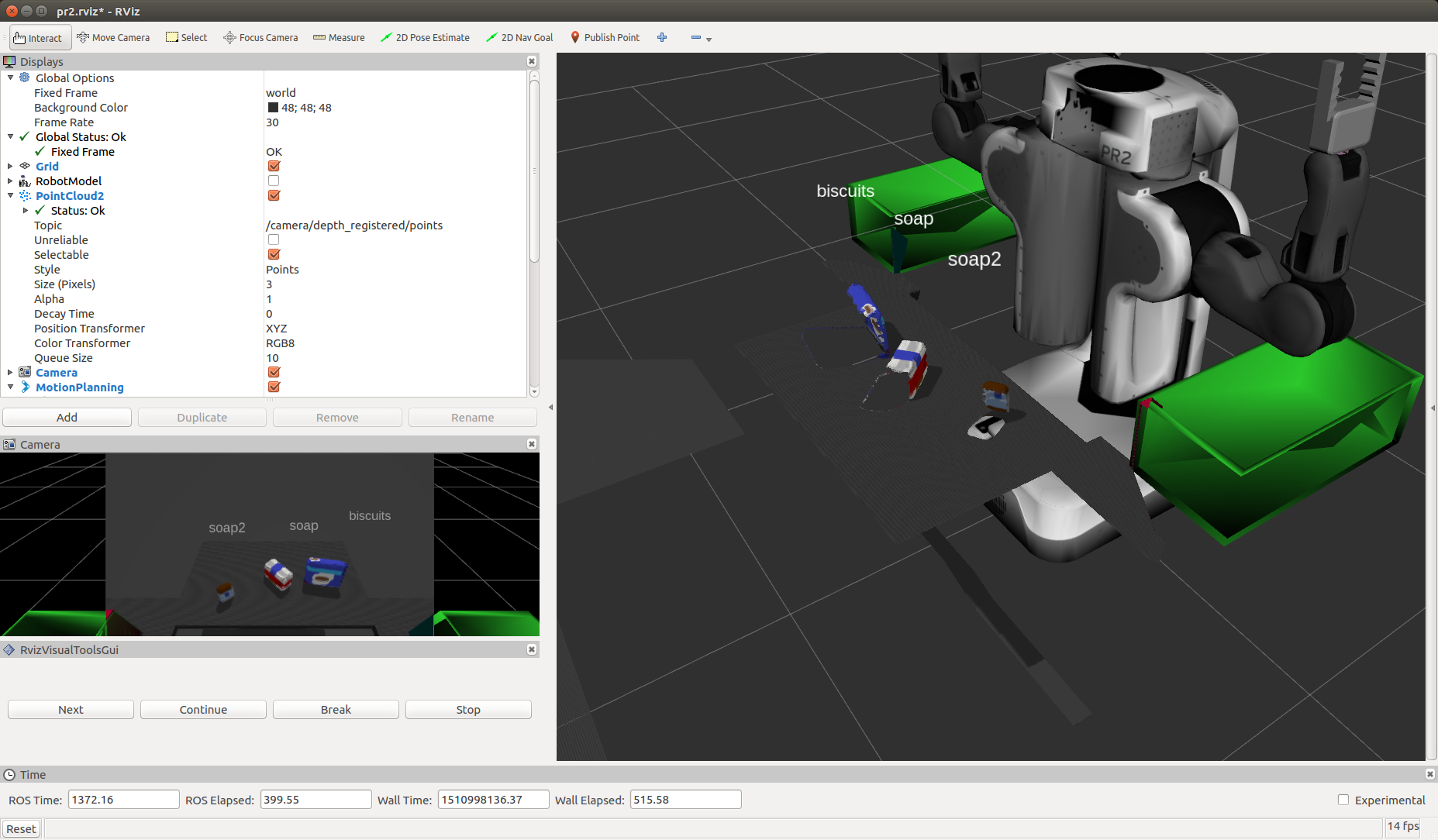
The trained model.sav was used as input into the perception pipeline where for each cluster found in the point cloud, histogram features were extracted as per the training step above and used in prediction and added to a list of detected objects.
# Make the prediction, retrieve the label for the result
# and add it to detected_objects_labels list
prediction = clf.predict(scaler.transform(feature.reshape(1, -1)))
label = encoder.inverse_transform(prediction)[0]
It was interesting to learn about using point clouds and to learn this approach. I found occasionally there was some false readings. In addition few of the objects were picked and placed in the crates (the PR2 did not seem to grasp them properly). This may mean that further effort is needed to refine the centroid selection of each object.
Whilst I achieved average ~90% accuracy, across all models, on the classifier training, with more time spent, I would have liked to have achieved closer to 97%. This would also improve those false readings. I’m also not sure I fully understand the noise introduced in this project from the PR2 RGBD camera.
If I was to approach this project again, I’d be interested to see how a 4D Tensor would work via deep learning using YOLO and/or CNNs. Further research is required.
Having completed, as one of the first, the Udacity Self Driving Car Nano Degree in October 2017, I thought I’d share some of the things I learnt along the way.
Rather than recap the projects, over the three terms, I’m going to focus in this post, on the philosophy and attitude I developed, to complete the nano degree program.
When I was first accepted, my initial reaction was geez have I bitten off more than I can chew. How am I going to cope with the mathematics and the theoretical side. It was a major concern.
Whilst at school I always had excelled at maths, and it was what led me initially into computing at a young age. I used to love writing graphics routines and optimising them. As my maths skills improved I learnt new ways of drawing circles and objects. I can’t remember if I got into Vectors. Yet past school, having started working in corporate IT, I had little use for maths skills besides that which was needed for Accounting. Yes for a number of years, IT dumbed down my maths skills.
IT was more focused on entering data, storing it and reporting on it at some monthly and yearly aggregate levels. Sure I worked on near realtime and mission critical systems but the need for very strong maths skills was limited. It was not a choice of my own, it was just that the technology that did leverage Maths, was perceived as scientific or too risky to adopt by business. It just didn’t have priority or urgency. Or if it was implemented it was a black box, that you supplied some input to, and you just consumed the output.
Getting back to the Self Driving Car Nano Degree, it was these black boxes that were our projects. In the project we needed to create the black boxes, to understand the theory and the mathematics.
Before starting the Nano Degree, I brushed up on matrices and vectors using the Kahn Academy.
Occasionally I got a little stuck on the mathematical proofs but once I understood the code for the maths, I normally was ok. Yes my brain now works off of code, not maths. We experienced some numerical instability, which was normally solved by interacting with others on the slack channels.
It was hard at times being the first going through the material. However with patience, with continuously reviewing the material, it reinforced what was being taught. You had to be methodical and test each assertion you were making about your code. Sometimes it required taking the algorithm and implementing in a repeatable test case inside a Jupyter Notebook. I found visualising the data improved understanding and helped to identify if anything was erroneous.
You could spend ages looking at the code and not see any obvious mistake. Without visualising the output, an easy mistake such as an incorrect sign in a rotation matrix, was not easy to observe.
The most valuable tool for when you got stuck was slack and your fellow students. These fellow students were online at all hours of the day, from across the globe.
After a few projects, I soon found an approach, that worked for me. It boiled down to learning, writing some code, seeing what happened, fixing what was broken, validating my learning and repeating until I had a project that met requirements.
Getting stuck, sometimes meant having a break, or having a late night. If I was really into tuning, it often meant the late night. Tweaking and trying different settings to get the Neural Network or Algorithm to achieve what you needed, was addictive. It was so much better, then reading or watching a video. The impact of changing your code was visible, in most projects in the simulator.
Your code didn’t produce a report, it produced observable action! It was like when I was a kid programming graphics for the first time.
So if your the type that likes to write those black boxes that other programmers use, you’ll excel at this Nano Degree. If your the type that consumes black boxes, that others have written, you may need to change your outlook.
In this Advanced Lane Detection project, we apply computer vision techniques to augment video output with a detected road lane, road radius curvature and road centre offset. The video was supplied by Udacity and captured using the middle camera.
sample lane detection result
The goals / steps of this project are the following:
Compute the camera calibration matrix and distortion coefficients given a set of chessboard images.
Apply a distortion correction to raw images.
Use color transforms, gradients, etc., to create a thresholded binary image.
Apply a perspective transform to rectify binary image (“birds-eye view”).
Detect lane pixels and fit to find the lane boundary.
Determine the curvature of the lane and vehicle position with respect to center.
Warp the detected lane boundaries back onto the original image.
Output visual display of the lane boundaries and numerical estimation of lane curvature and vehicle position.
Every camera has some distortion factor in its lens. The known approach to correct for that in (x,y,z) space is apply coefficients to undistort the image. To calculate this a camera calibration process is required.
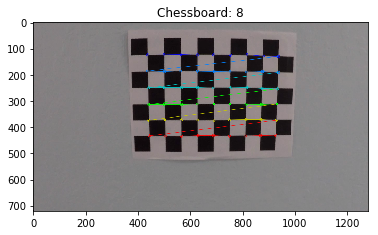
It involves reading a set of warped chessboard images, converting them into grey scale images before using cv2.findChessboardCorners() to identify the corners as imgpoints.
If corners are detected then they are collected as image points imgpoints along with a set of object points objpoints; with an assumption made that the chessboard is fixed on the (x,y) plane at z=0 (object points will hence be the same for each calibration image).
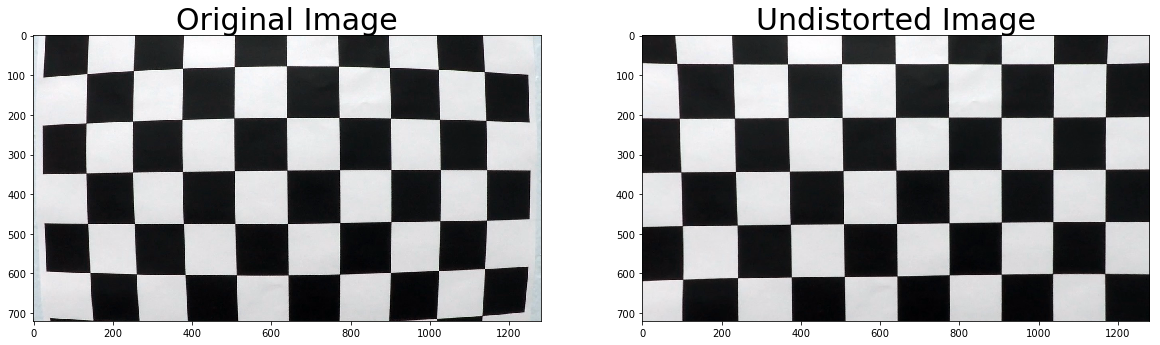
In the function camera_calibrate I pass the collected objpoints, imgpoints and a test image for the camera image dimensions. It in turn uses cv2.calibrateCamera() to calculate the distortion coefficients before the test image is undistorted with cv2.undistort() giving the following result.
Pipeline (Test images)
After camera calibration a set of functions have been created to work on test images before later being used in a video pipeline.
Distortion corrected image
The undistort_image takes an image and defaults the mtx and dist variables from the previous camera calibration before returning the undistorted image.
Threshold binary images
A threshold binary image, as the name infers, contains a representation of the original image but in binary 0,1 as opposed to a BGR (Blue, Green, Red) colour spectrum. The threshold part means that say the Red colour channel( with a range of 0-255) was between a threshold value range of 170-255, that it would be set to 1.
A sample output follows.
Initial experimentation occurred in a separate notebook before being refactored back into the project notebook in the combined_threshold function. It has a number of default thresholds for sobel gradient x&y, sobel magnitude, sober direction, Saturation (from HLS), Red (from RGB) and Y (luminance from YUV) plus a threshold type parameter (daytime-normal, daytime-bright, daytime-shadow, daytime-filter-pavement).
Whilst the daytime-normal threshold worked great for the majority of images there were situations where it didn’t e.g. pavement colour changes in bright light and shadow.
Daytime Normal with noise bright light & pavement changeDaytime Normal with shadow
To be able to detect the road lines, the undistorted image is warped. The function calc_warp_points takes an image’s height & width and then calculates the src and dst array of points. perspective_transforms takes them and returns two matrixes M and Minv for perspective_warp and perpective_unwarp functions respectively. The following image, shows an undistorted image, with the src points drawn with the corresponding warped image (the goal here was straight lines)
Lane-line pixel identification and polynomial fit
Once we have a birds eye view with a combined threshold we are in a position to identify lines and a polynomial to draw a line (or to search for points in a binary image).
topdown warped binary image
A histogram is created via lane_histogram from the bottom third of the topdown warped binary image. Within lane_peaks, scipy.signal is used to identify left and right peaks. If just one peak then the max bin either side of centre is returned.
calc_lane_windows uses these peaks along with a binary image to initialise a left and right instance of a WindowBox class. find_lane_window then controls the WindowBox search up the image to return an array of WindowBoxes that should contain the lane line. calc_fit_from_boxes returns a polynomial or None if nothing found.
poly_fitx function takes a fity where fity = np.linspace(0, height-1, height) and a polynomial to calculate an array of x values.
The search result is plotted on the bottom left of the below image with each box in green. To test line searching by polynomial, I then use the left & right WindowBox search polynomials as input to calc_lr_fit_from_polys. The bottom right graphic has the new polynomial line draw with a blue search window (relates to polynomial used for the search from WindBoxes) that was used overlapping with a green window for the new.
Warped box seek and new polynomial fit
Radius of curvature calculation and vehicle from centre offset
In road design, curvature is important and its normally measured by its radius length. For a straight line road, that value can be quite high.
In this project our images are in pixel space and need to be converted into meters. The images are of US roads and I measured from this image the distance between lines (413 pix) and the height of dashes (275 px). Lane width in the US is ~ 3.7 meters and dashed lines 3 metres. Thus xm_per_pix = 3.7/413 and ym_per_pix = 3./275 were used in calc_curvature. The function converted the polynomial from pixel space into a polynomial in meters.
To calculate the offset from centre, I first determined where on the x plane, both the left lx and right rx lines crossed the image near the driver. I then calculated the xcentre of the image as the width/2. The offset was calculated such (rx - xcenter) - (xcenter - lx) before being multiple by xm_per_pix.
Final pipeline
I decided to take a more python class based approach once I progressed through this project. Inside the classes, I called the functions mentioned previously. The classes created were:
Lane contains image processing, final calculations for view drawing and reference to left and right RoadLines. It also handled searching for initial lines, recalculations and reprocessing a line that was not sane;
RoadLine contains a history of Lines and associated curvature and plotting calculations using weighted means; and
Line contains detailed about the line and helper functions
Processing is triggered by setting the Lane.image variable. Convenient property methods Lane.warped, Lane.warped_decorated, lane.result and lane.result_decorated return processed images. It made it very easy to debug output using interactive ipywidgets (which don’t work on github)
To some degree, I got distracted with trying to solve the issues I found in my algorithm with the challenge videos. This highlighted, that I need to improve my understanding of colour spaces, sobel and threshold combinations.
I included a basic algorithm to remove pavement colours from the images using a centre, left and right focal point. I noticed that the dust colour on the vehicle seemed to be also in the road side foliage. This however wasn’t sufficient to remove all pavement colour and didn’t work when there was a road type transition. It was very CPU intensive.
In the end, I used a combination of different methods, that used a basic noise filter on warped binary images to determine, if it was sufficient to look for a line or not. If it wasn’t it tried the next one, with the final being a vertical rectangle window crawl down the image. Where the best filter was determined for each box. Again this was CPU intensive, but worked.
Another issue faced was using the previous curvature radius to determine if this line was sane or not. The values were too jittery and when driving on a straight line, high. I decided not to pursue this.
Opportunities for improvement in the algorithm/pipeline
There is room here for some refactoring into a more Object oriented approach. This was not evident at the start of the project as to how it should be structured. I experimented a little with using Pool from multiprocessing to parallelise left and right lane searches. It didn’t make it into my final classes as for normal line searching using a polynomial, as I did not ascertain if the multiprocessing overhead, outweighed the parallelism value. Certainly potential here to use a more functional approach to give the best runtime options for parallelisation.
Other areas, include automatically detecting the src points for warp, handling bounce in the road and understanding surface height (above road) of the camera and its impact.
I thought also as I’ve kept history, I could extend the warp to include a bird’e eye representation of the car on the road and directly behind it. I did mean averaging on results for smoothing drawn lines, but this was not included in the new line calculations from the next image frames.
The algorithm could also be made to make predictions about the line when there is gaps. This would be easier with continuous lines then dashed.
Hypothetical pipeline failure cases
Pavement fixes and/or combined with other surfaces that create vertical lines near existing road lines.
It would also fail if there was a road crossing or a need to cross lanes or to exit the freeway.
Rain and snow would also have an impact and I’m not sure about night time.
Tail gating a car or a car on a tighter curve would potentially interrupt the visible camera and hence line detection.























{kind=link}
{kind=link}
{kind=link}
{kind=link}